Hovering Solutions puts into practice a flying robot able to produce 3D models of vertical ore passes in underground mining industry.
The system was put into practice in collaboration with MATSA, at Mina Magdalena copper underground mine, located in the south of Spain.
3D Mapping System
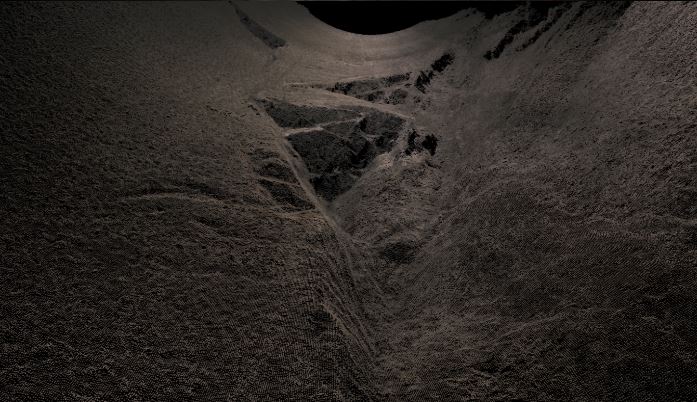
The AD-HOC designed autonomous flying robots are able to capture data through vertical scenarios such as ore passes, normally used to transport materials between different vertical levels in underground mining activities. The resulting information of the autonomous underground explorations are 3D models including real-time point-could visualization for an in-situ fast assessment, as well as high density 3D models provided in standard file formats, including high-definition textures of rock surfaces.
Point-clouds are combined with geolocation information to provide absolute geoinformation to the models, useful for underground survey works, while textured models allow to geologists and engineers to analyse the surface status and use the information in rocks mechanics analysis to prevent future problems.
Robot Features
The flying robot weights less than 1.7kg and is able to explore vertical ore passes and similar scenarios without human intervention (i.e. without pilot) and no radio communication even in light- and GNSS-denied scenarios. Having a size of 43cm between rotors, the robot can fly through narrow passes with a minimum diameter of 1.5m, producing survey grade 3D models with no risks for mining staff.
We serve cookies. If you think that's ok, just click "Accept all". You can also choose what kind of cookies you want by clicking "Settings".
Read our cookie policy