Penstocks are widely used in the hydropower industry around the world. This kind of pipes are used to carry water down from a water reservoir directly into the turbines to produce clean energy.
The Problem
Penstocks are widely used in the hydropower industry around the world. This kind of pipes are used to carry water down from a water reservoir directly into the turbines to produce clean energy.
The pipes are normally made of steel and require regular inspections in order to assure the good condition of the inner surface and prevent potential damages that occur over the years due to continuous friction with high pressure water.
Mostly build on hillsides or parallel to dams, the penstocks are sharply sloped or even totally vertical. One of the main problems the hydropower industry has been dealing with for years is how to access to the unreachable areas of the penstocks’ interiors.
The use of professional climber teams has so far been the most adopted solution. However, the inspection operation is slow, time consuming and, risky as people have to descend through the penstock cavity and work in a confined space, in total darkness and in teams of 2 or 3 people.
The Solution
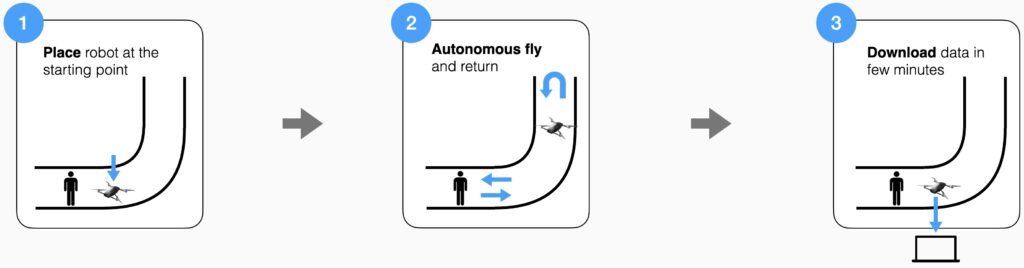
Hovering Solutions has developed a new generation of flying robots able to fly autonomously through the interior of vertical or inclined pipes such as the penstocks used in hydropower plants. The system has been successfully put into practice in different hydro power plants of Iberdrola Group.
The use autonomous flying robots significantly decreases the associated risks, costs and time of survey and inspection while enhancing the amount of data acquired. Furthermore, the simple, fast and effective solution facilitates a more regular inspection of infrastructure, reducing risks related to potential failures, including human accidents or costly damages.
In comparison to traditional inspections techniques, the use of flying robotics:
reduces the time needed for a regular inspection from days to only few hours,
decreases the costs by 50%,
reduces the required human resources to only 1 person and
provides an invincible risks reduction solution
The Technology
The technology has been developed by Hovering Solutions as OEM. The small robot is equipped with a fully onboard positioning and navigation system, which is why no external references or beacons are needed for the system to operate. The novel positioning unit is able to estimate the robot’s position, attitude and speed in GNSS(GPS)- and light- denied environment. The navigation unit is totally immune to magnetic field distortions produced by the metal surrounding the robot during the flight.
Total vehicle weighs less than 1.7 kg and the battery lifetime is enough to scan up to 700 meters of penstock in a single flight. With a diameter of 43 cm between motors, the robot is able to fly in autonomous mode through penstocks as narrow as 2 meters in diameter, up to a maximum of 10 meters in diameter.
The inspection operation is carried out with NO pilot,NO radio communications and NO line-of-sight, all of them are crucial factors to accomplish a successful mission in the target scenario.
The system is equipped with a new module named as H-eyes for which a patent has been recently submitted by Hovering Solutions.
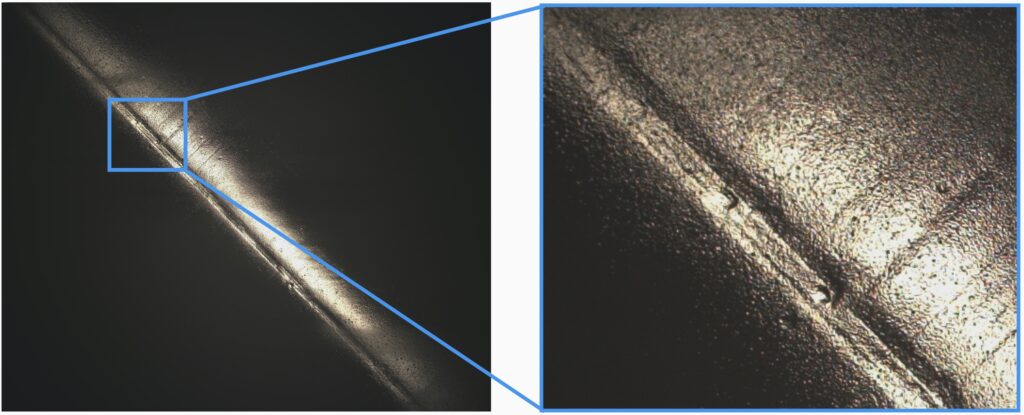
This new technology provides outstanding quality on surface information data capture and is able to detect faults and details as small as 1 square millimeter on the penstock’s surface.
In addition, the new H-eyes system improves the robot’s navigation performance and reduces the overall vehicle energy consumption.
Results
After the vehicle landing, it takes few minutes to compress and transfer the gathered information to an external local or remote computer, if a wireless local area network is available. Inspection results are:
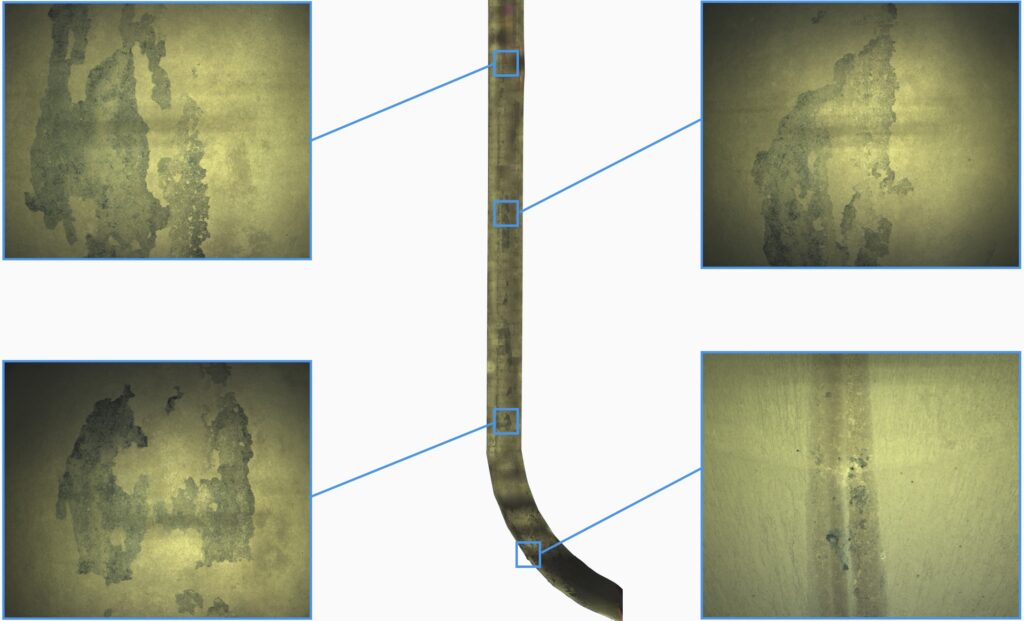
High resolution images for surface details analysis.
3D laser scans in order to detect deformations of the penstock cross-section.
In case of large corrosions areas are detected, a big-scale corrosion map is produced in order to analyze critical parts, create patterns and predict future corrosion behavior.
The information provided is geo-located in local coordinates based on existing drawings or previous survey data. This geo-location information is crucial to provide coordinates to existing faults or points of interest with an accuracy of few centimeters in order to quantify their evolution or assess possible actions efficacy in future inspections.
We serve cookies. If you think that's ok, just click "Accept all". You can also choose what kind of cookies you want by clicking "Settings".
Read our cookie policy